| (别光坐在那儿!)构建的东西! ! |
学习分析数字电路需要大量的学习和实践。通常情况下,学生通过做大量例题来练习,并对照课本或老师提供的答案来核对答案。虽然这很好,但还有一个更好的方法。
实际上你会学到更多构建和分析真实电路,让您的测试设备提供“答案”,而不是一本书或其他人。要想成功地构建电路,请遵循以下步骤:
始终确保电源电压水平在您计划使用的逻辑电路的规格范围内。如果TTL,电源必须是一个5伏的稳压电源,调整到一个值尽可能接近5.0伏直流。
一个可以节省时间和减少错误可能性的方法是,从一个非常简单的电路开始,在每次分析后逐步增加组件来增加它的复杂性,而不是为每个实践问题建立一个全新的电路。另一种节省时间的技术是在各种不同的电路配置中重复使用相同的元件。这样,您就不必多次度量任何组件的值。
让电子自己解答你自己的“练习题”吧!
根据我的经验,学生需要大量的电路分析练习才能精通。为此,教师通常会给学生提供大量的练习题,并提供答案供学生核对。虽然这种方法让学生精通电路理论,但它没有充分教育他们。
学生们需要的不仅仅是数学练习。他们还需要真实的动手实践,建造电路和使用测试设备。因此,我建议以下替代方法:学生应该构建自己的“实践问题”用真实的组件,并尝试预测各种逻辑状态。通过这种方式,数字理论“活了起来”,学生们获得了实践上的熟练程度,而不仅仅是通过解决布尔方程或简化卡诺图。
采用这种实践方法的另一个原因是为了教学生科学的方法:通过实际实验来检验假设(在这里是逻辑状态预测)的过程。学生也将发展真正的故障排除技能,因为他们偶尔会犯电路构造错误。
在开始之前,花点时间和您的班级复习一些构建电路的“规则”。用与学生讨论习题相同的苏格拉底式方式讨论这些问题,而不是简单地告诉他们应该做什么,不应该做什么。当学生们以一种典型的讲课(教师独白)形式呈现时,他们对指令的把握是如此之差,这让我一直感到惊讶!
我强烈推荐CMOS逻辑电路用于家庭实验,在那里学生可能没有访问5伏稳压电源。现代CMOS电路在静电放电方面要比第一代CMOS电路坚固得多,所以担心学生没有一个“适当”的实验室设置在家损害这些设备基本上是没有根据的。
有些老师可能会抱怨让学生建立真实的电路而不仅仅是数学分析理论电路,这“浪费了”时间,这里我要给他们一个提示:
学生选择您的课程的目的是什么?
如果你的学生将使用真实的电路,那么他们应该尽可能学习真实的电路。如果你的目标是培养理论物理学家,那么请务必坚持抽象分析!但我们大多数人都计划让学生们利用我们提供的教育在现实世界中做些事情。lol亚博对ig当他们将他们的知识应用到实际问题上时,花在建造真实电路上的“浪费”时间将会带来巨大的回报。
此外,让学生建立自己的练习问题,教他们如何表演主要研究,从而使他们能够继续他们的电气/电子学自主教育。yabosports官网lol亚博对ig
在大多数科学中,建立真实的实验比建立电路要困难和昂贵得多。核物理、生物学、地质学和化学教授非常希望他们的学生能够将高等数学应用到真正的实验中,不会造成安全隐患,而且成本低于一本教科书。他们不能,但你可以。利用科学固有的便利,然后让你的学生在很多真实的电路上练习他们的数学!
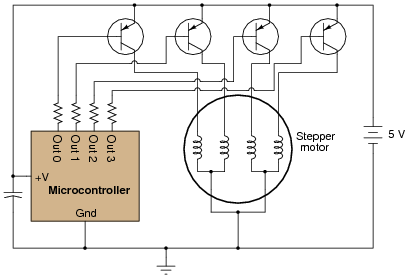
在这个电路中,一个微控制器控制着一种称为a的特殊类型的电动机的转动步进电机按顺序一次激活一个晶体管(因此,一次激活一个电机线圈)。每走一步,电机旋转固定的角度,通常是1.8度:
|
|
每个电机线圈通电时会产生相对较大的电流,需要晶体管在微控制器输出和电机线圈之间“插入”。
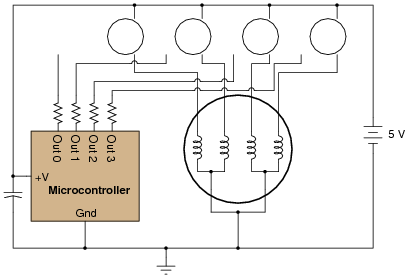
识别来自微控制器输出端口的逻辑信号类型(“高”或“低”)需要为每个晶体管供电。同时,在下面的图中展示如何用合适的MOSFET替换双极结晶体管来减少功率损耗和部件数量:
|
|
当相应的微控制器输出进入“低”(地电位)状态时,每个步进电机线圈通电。

|
|
后续问题:如果电阻必须留在原处,修改后的(MOSFET而不是BJT)电路还能正常工作吗?
这个冗长的问题的目的不仅仅是让学生弄清楚如何用MOSFET取代BJT,而且还向他们介绍微控制器的概念,这是一个越来越重要的设备在现代电子系统。
为了简单起见,在这个电路中没有显示整流二极管。如果有学生问这个问题,表扬他们注意到!
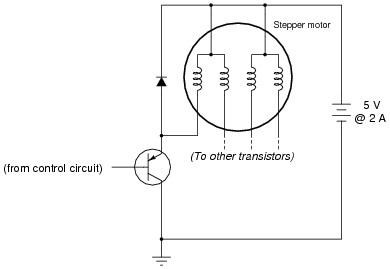
步进电机线圈通常会产生大量电流,这就需要使用功率晶体管来“缓冲”电机的控制电路。一个典型的步进电机最终驱动电路看起来是这样的(为了简洁起见,这里只显示了四个输出晶体管中的一个):
|
|
当然,安装二极管是为了防止每次关闭时高压冲击破坏输出晶体管。然而,这导致了一个不同的问题:当自由滚轮二极管就位时,当各自的晶体管关闭时,在每个线圈中形成的磁场需要更长的时间来“衰减”。这种时间延迟给步进电机施加了最大的转速,因为在前一步的磁场消散之前,电机不会移动到下一步。
该电路可以做什么修改,以允许晶体管切换更快,以更高的转速驱动步进电机?详细解释为什么你的解决方案会奏效。

|
|
我不会解释这个解为什么有效,但我会让迈克尔·法拉第给你一个数学上的“提示”
|
后续问题:图中新电阻的电阻值是由哪些因素决定的?
挑战问题:确定如何计算在给定一定的电阻值、二极管规格和满载电机线圈电流的情况下,在晶体管集电极上看到的电压“尖峰”的大小。
要求学生描述在没有整流二极管的情况下,晶体管关断时每个线圈的磁通变化率(假设晶体管能够承受电感产生的瞬态电压)。你的学生应该清楚,为了防止高压“尖峰”而包含的二极管实际上会造成磁场衰减时间的问题。
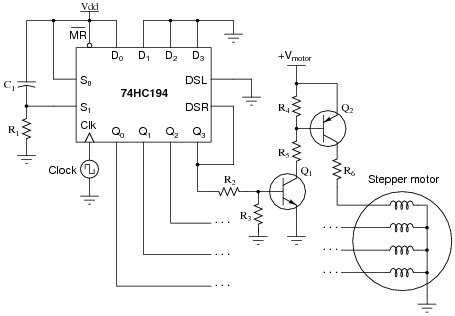
这个移位寄存器电路驱动一个单极步进电机的四个线圈,每次一个线圈,以与时钟同步的方式旋转。驱动晶体管电路(Q1,问2,电阻R2通过R6)只显示了四个线圈中的一个。其他三个移位寄存器输出具有连接到各自电机线圈的相同驱动电路:
|
|
假设这个步进电机电路工作了好几年,然后突然停止工作。解释你将在哪里进行最初的几次测量来隔离问题,以及你为什么要在那里进行测量。
我的第一步将是检查是否存在足够的直流电源到移位寄存器IC和电机(晶体管驱动电路)。然后,我将使用电压表或逻辑探头来检查任何移位寄存器的Q输出是否有脉冲。这能告诉我是移位寄存器出了问题还是电源电路出了问题。
这是一个与您的学生讨论的好问题,因为它帮助他们理解如何“分而治之”一个故障系统。
步进电机常用于低功率伺服机构,如小型机器人、计算机打印机和其他精密机电机械。解释为什么这种类型的电机比永磁直流电机或其他类型的电机更受欢迎。提示:答案与电机本身的名称(“步进器”)密切相关。
与其他类型的发动机不同,步进电机以离散的“步骤”移动,非常适合位置控制的数字模式。
当你在课堂上讨论步进电机时,确保学生有机会在自己的手中感受步进电机的运动。如果你不凑巧有任何步进电机可用,他们很容易获得从废弃的电脑打印机回收零件!






